



GREAT
EXPERIENCE
My extensive experience in the field is a testament to my expertise and dedication, consistently delivering outstanding results in the digital landscape. I'm a seasoned professional who excels in the world of development.
AUTONOMY
I excel in my work with a strong sense of autonomy, making me a self-reliant and efficient developer. My ability to take initiative and drive projects forward independently has consistently proven to be a valuable asset in delivering successful digital solutions.
INVOLVMENT
I actively engage in every aspect of the development process, fostering collaboration and synergy within teams. My dedication to active involvement ensures that I contribute effectively to projects, creating seamless and innovative digital solutions.

NFT App Development
Web application
Embark on an evolutionary exploration of digital ownership and creative expression with our NFT Application Development. This portfolio feature reveals the crossroads of advanced technology and artistic innovation, capturing the core of our dedication to reshaping the NFT landscape. Here are the key features:
1. Effortless Minting Process:
Dive into a user-friendly platform that simplifies the intricate task of minting NFTs. Our application ensures a seamless experience, allowing artists and creators to bring their digital assets to the blockchain with ease.
2. Decentralized Marketplace:
Navigate a decentralized marketplace that serves as a dynamic hub for NFT enthusiasts, collectors, and creators. Conduct secure, transparent transactions and engage in the vibrant world of buying and selling digital assets.
3. Smart Contracts Integration:
Leverage the power of smart contracts to automate and secure transactions. Our NFT Application seamlessly integrates blockchain-based contracts, streamlining processes and enhancing trust in every interaction.
4. Customizable NFT Profiles:
Showcase your distinct identity within the NFT ecosystem. Personalize your profile, highlight your unique collection, and connect with fellow community members in a platform tailored for individual expression.
5. Interoperability with Leading Blockchains:
Embrace flexibility with our NFT Application, compatible across a range of leading blockchain networks. Whether on Ethereum, Binance Smart Chain, or other networks, our platform ensures adaptable integration to meet diverse user preferences.
6. Community Engagement Tools:
Cultivate a sense of community among NFT enthusiasts. Our application features tools for engaging in discussions, sharing insights, and collaborating on creative projects within the dynamic and evolving NFT space.
7. Real-time Analytics:
Stay informed with real-time analytics and insights into your NFT portfolio. Track performance, monitor market trends, and make well-informed decisions as you navigate the dynamic landscape of digital assets.
Embark on the future of digital ownership and artistic expression with our NFT Application Development. Whether you're an artist seeking to tokenize your work or a collector exploring unique digital assets, our platform is meticulously crafted to enhance your experience within the exhilarating realm of NFTs.
NFT App Development
Web application
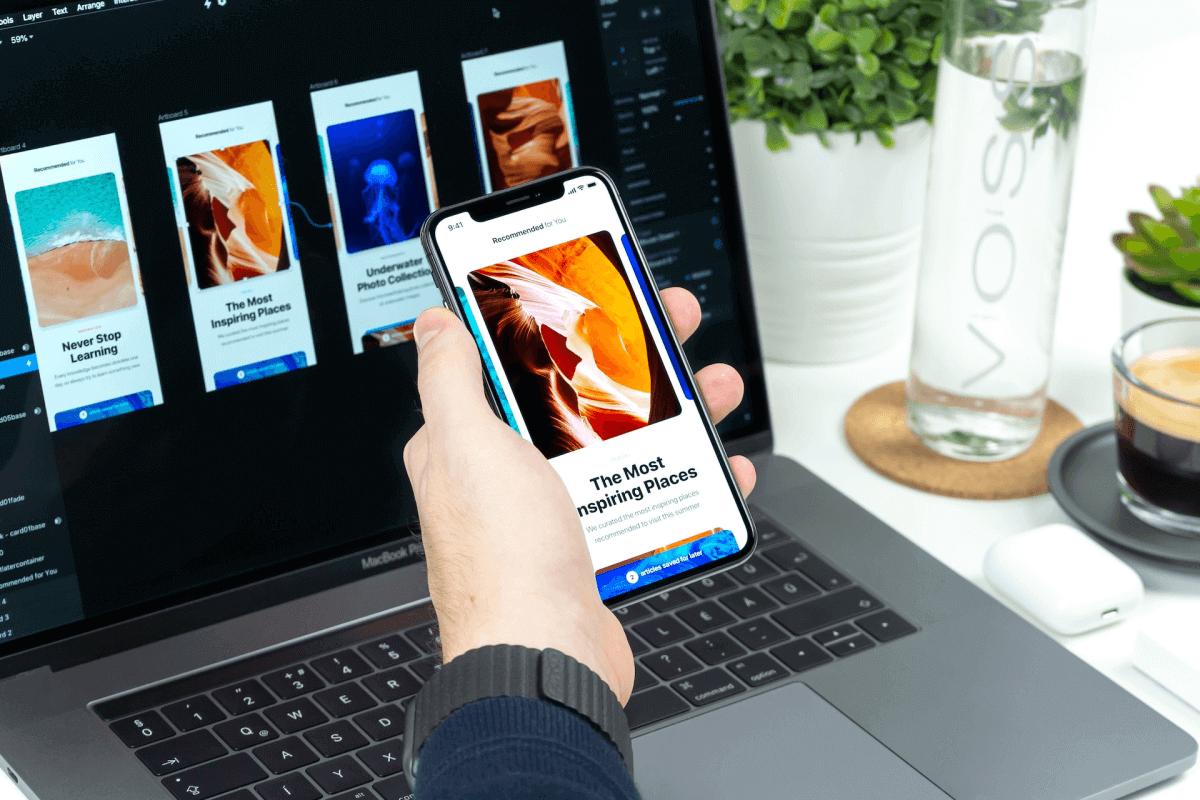
Travel Mobile App Design
Mobile application
Embark on a journey through seamless travel experiences with our Travel Mobile App Design. Delve into the intersection of wanderlust and technology as we unveil a mobile application meticulously crafted to redefine your travel adventures. Here's an insight into the key features that make our app your ultimate travel companion:
1. Intuitive Navigation:
Seamlessly navigate through a user-friendly interface that puts the world at your fingertips. Effortlessly plan your journey, from selecting destinations to crafting personalized itineraries.
2. Immersive Visual Experience:
Embark on a visual journey with captivating images, interactive maps, and rich multimedia that bring destinations to life even before you set foot on the path of exploration.
3. Smart Travel Planning:
Elevate your travel planning with smart features that cater to your preferences – from real-time weather updates to suggestions based on your interests and travel history.
4. Efficient Booking System:
Streamline your travel arrangements with a hassle-free booking system. Reserve flights, hotels, and activities seamlessly, ensuring a stress-free and enjoyable journey.
5. Local Insights and Recommendations:
Uncover the hidden gems of each destination with local insights and recommendations. Our app goes beyond the ordinary, providing you with authentic experiences curated by seasoned travelers.
6. Seamless Integration with Social Media:
Share your travel adventures effortlessly with integrated social media features. Connect with fellow explorers, showcase your favorite moments, and gather inspiration for your next destination.
7. Offline Accessibility:
Stay connected even when off the grid. Download maps, itineraries, and essential information for offline access, ensuring you have the details you need wherever your journey takes you.
Step into a world where travel dreams become reality, guided by the innovative design and functionality of our Travel Mobile App. Whether you're a jet-setter or a weekend wanderer, this app is tailored to enhance every aspect of your travel experience, making each adventure a memorable chapter in your personal journey log.
Travel Mobile App Design
Mobile application

Restaurant Web Application
UI / UX
Step into the culinary digital domain, where the convergence of culinary mastery and cutting-edge technology unfolds. Explore the core of our Restaurant Web Application – a groundbreaking platform meticulously crafted to revolutionize the dining experience. Here are the key features that define our innovative approach:
1. Intuitive User Interface:
Immerse users in a seamlessly navigable interface, providing effortless access to the restaurant's offerings with simplicity and elegance.
2. Dynamic Menu Showcase:
Present a visually appealing menu with vibrant images and detailed descriptions, creating an enticing virtual dining experience.
3. Effortless Reservations:
Streamline the reservation process with a user-friendly booking system, allowing customers to plan their dining experiences with ease.
4. Online Ordering and Delivery:
Enable customers to place orders conveniently online, choosing between home delivery and curbside pickup, and ensuring a smooth and secure transaction process.
5. Personalized User Accounts:
Enhance customer loyalty through personalized accounts, allowing users to save favorite orders and access exclusive offers.
6. Real-time Updates:
Keep patrons informed with real-time updates on special events, promotions, and menu additions through push notifications and email alerts.
7. Responsive Design:
Ensure a seamless experience across various devices with a responsive design, adapting to the preferences of a tech-savvy audience.
8. Secure Payment Gateway:
Prioritize security with a robust payment gateway, offering multiple payment options to instill confidence in users during transactions.
Restaurant Web Application
UI / UX

Technology and Workplace Communication
VANCOUVER - CANADA
Emotional Intelligence and Leadership
VANCOUVER - CANADA
The Role of Self-Efficacy in Career Choice and Job Performance
VANCOUVER - CANADA
Early Childhood Education and Development
VANCOUVER - CANADA
Parental Involvement and Academic Success
VANCOUVER - CANADA
Parental Involvement and Academic Success
VANCOUVER - CANADA
Investigating the Impact of Social Media Use on Mental Health in Young Adults
VANCOUVER - CANADA
Parental Involvement and Academic Success
VANCOUVER - CANADA
Early Childhood Education and Development
VANCOUVER - CANADA
Career Satisfaction and Burnout among Teachers
VANCOUVER - CANADA
A Study of the Relationship between Personality Traits and Leadership Style
VANCOUVER - CANADA
Early Childhood Education and Development
VANCOUVER - CANADA
Exercise and Mental Health in Adolescents
VANCOUVER - CANADA
A Study of the Relationship between Personality Traits and Leadership Style
VANCOUVER - CANADA
- Business
- Cars
The future of EVs

The future of EVs
October 9, 2023
The future of electric vehicles (EVs) looks bright, as more and more consumers are choosing to switch to electric power and governments and businesses are investing in the development of charging infrastructure.
One potential area of growth for EVs is in the development of autonomous vehicles, which are vehicles that are able to operate without the need for a human driver. Autonomous EVs have the potential to significantly improve safety and efficiency on the roads, and they are already starting to be tested in a variety of settings.
Another potential area of growth for EVs is in the development of new battery technologies. Current EV batteries have a limited range and can be expensive, which can be a barrier for some potential buyers. However, researchers are working on developing new battery technologies that are more energy-dense, longer-lasting, and more affordable, which could make EVs more appealing to a wider range of consumers.
Additionally, the growth of EVs is likely to be supported by an expansion of the charging infrastructure. As more and more EVs are sold, the demand for charging stations will increase, which will drive the development of new charging technologies and the expansion of the existing charging network.
Overall, the future of EVs looks bright, as new technologies and innovations continue to emerge and more consumers and businesses recognize the benefits of electric power.
- Blockchain
- Computing
Blockchain Technology

Blockchain Technology
September 2, 2023
Blockchain technology is a decentralized and distributed ledger system that has gained widespread attention for its potential to revolutionize various industries. Unlike traditional centralized databases, blockchain stores data in a tamper-resistant, chronological chain of blocks. In this discussion, we will explore the fundamental concepts of blockchain, its applications beyond cryptocurrencies, and some of the challenges it faces.
At its core, a blockchain is a chain of blocks, each containing a batch of transactions. These blocks are linked together using cryptographic hashes, ensuring the integrity of the data. Once a block is added to the chain, it becomes virtually immutable, making it highly secure against tampering. Blockchains can be public, allowing anyone to participate, or private, with restricted access. Key features include decentralization, transparency, and consensus mechanisms like Proof of Work (PoW) or Proof of Stake (PoS).
While blockchain's initial application was in cryptocurrencies like Bitcoin, its potential extends far beyond digital money. It is increasingly used in various sectors such as supply chain management, where it enhances transparency and traceability. Blockchain also finds applications in identity verification, enabling individuals to have control over their personal information. Smart contracts, self-executing agreements with predefined rules, automate processes in fields like legal and finance. Moreover, blockchain can facilitate voting systems, reducing fraud and increasing trust in elections.
Despite its promise, blockchain faces several challenges. Scalability is a significant concern, as increasing the number of transactions can slow down networks and raise costs. Energy consumption, especially in PoW-based blockchains, has drawn criticism for its environmental impact. Regulatory and legal issues also pose challenges, as governments grapple with how to regulate this technology. Additionally, blockchain is still evolving, and standards for interoperability and security need further development.
Blockchain technology is still in its early stages, but its potential to disrupt industries is evident. As scalability and energy efficiency improve, and regulatory frameworks mature, blockchain adoption is likely to grow. Interoperable blockchain networks could enable seamless data sharing, and advancements in consensus mechanisms could enhance efficiency and security. In the future, blockchain may become an integral part of various sectors, transforming how data is stored, shared, and verified.
In conclusion, blockchain technology has emerged as a powerful innovation with the potential to reshape industries beyond cryptocurrencies. Its fundamental principles of decentralization and transparency offer solutions to long-standing challenges in data management and trust. While challenges persist, ongoing research and development efforts are paving the way for blockchain's integration into diverse applications, making it a technology to watch in the coming years.
- Computing
Quantum Computing
Quantum Computing
September 2, 2023
Quantum Computing is a cutting-edge field that explores the use of quantum-mechanical phenomena to perform computations. Unlike classical computers that use bits as the fundamental unit of information, quantum computers use quantum bits or qubits, which can exist in multiple states simultaneously due to the principles of superposition and entanglement. In this discussion, we will explore the fundamentals of quantum computing, its potential applications, and some of the challenges it faces.
Quantum Computing Fundamentals:
Quantum computers leverage the unique properties of qubits to perform calculations at a scale that classical computers cannot achieve. Superposition allows qubits to represent both 0 and 1 simultaneously, and entanglement enables the state of one qubit to be dependent on the state of another, even if they are physically separated. Quantum gates manipulate these qubits to perform operations, and quantum algorithms harness these properties for solving specific problems more efficiently.
Potential Applications:
Quantum computing holds immense promise in various domains, including cryptography, optimization, drug discovery, and materials science. One notable application is in breaking current encryption methods, which could have both positive and negative implications for cybersecurity. Quantum computers can also revolutionize supply chain optimization, simulate quantum systems accurately, and discover new materials with extraordinary properties. These applications have the potential to reshape industries and scientific research.
Challenges in Quantum Computing:
Despite its potential, quantum computing faces several significant challenges. One key challenge is maintaining the stability of qubits. Qubits are highly susceptible to environmental factors like temperature and electromagnetic radiation, making error correction a daunting task. Developing error-correcting codes and stable qubit technologies is crucial for practical quantum computing. Moreover, building scalable quantum hardware remains a considerable engineering challenge, with quantum computers today being in their infancy.
Quantum Computing and the Future:
The growth of quantum computing is inevitable, and its impact on various industries will be profound. Organizations and researchers are racing to develop quantum hardware, algorithms, and applications. Quantum supremacy, the point at which quantum computers surpass classical computers in specific tasks, is an exciting milestone on this journey. As quantum technologies mature, we can anticipate transformative breakthroughs in cryptography, optimization, and scientific discovery, ushering in a new era of computing and problem-solving.
In conclusion, quantum computing represents a revolutionary shift in the world of computation. Its unique properties and potential applications make it a highly promising field, although it is still in the early stages of development. Overcoming the challenges associated with quantum computing will be essential for realizing its full potential and reshaping various industries in the years to come.
- DevOps
- Web
DevOps and CI/CD

DevOps and CI/CD
September 2, 2023
DevOps and Continuous Integration/Continuous Deployment (CI/CD) are two closely related practices that have revolutionized software development and deployment processes in recent years. They represent a paradigm shift in how software is built, tested, and delivered, enabling organizations to achieve faster release cycles, higher quality software, and improved collaboration between development and operations teams. In this discussion, we will delve into the core principles and benefits of DevOps and CI/CD, their role in modern software development, and some best practices for implementing them effectively.
DevOps is a cultural and technical approach that emphasizes collaboration, communication, and integration between software development (Dev) and IT operations (Ops) teams. It aims to automate and streamline the entire software development lifecycle, from code development to production deployment. DevOps encourages a shared responsibility for the entire process, breaking down silos that often exist between these traditionally separate teams. Key principles include automation, continuous monitoring, and a focus on delivering value to the end-users.
Continuous Integration (CI) is a crucial component of DevOps. It involves the practice of frequently integrating code changes into a shared repository, where automated tests are run to ensure that new code does not introduce defects or break existing functionality. CI helps catch and fix issues early in the development process, reducing the likelihood of integration problems later on. It promotes a culture of frequent, small code changes and collaboration among developers.
Continuous Deployment (CD) takes CI a step further by automating the deployment process to production or staging environments after successful integration and testing. This means that every code change that passes CI tests is automatically deployed, reducing manual intervention and minimizing the time between writing code and delivering it to users. CD allows organizations to release new features and bug fixes rapidly, improving user satisfaction and competitive advantage.
The adoption of DevOps and CI/CD offers numerous benefits to organizations. These include faster time-to-market, increased software quality and reliability, reduced manual errors, improved collaboration among teams, and the ability to respond quickly to changing market demands. Additionally, DevOps and CI/CD provide greater visibility into the development and deployment process, enabling better tracking and management of software projects.
DevOps and CI/CD are transformative practices that have become essential in the software development landscape. They enable organizations to build, test, and deploy software more efficiently, with higher quality and faster release cycles. By fostering collaboration between development and operations teams and automating key processes, DevOps and CI/CD help organizations stay competitive in a rapidly evolving digital world. Embracing these practices is not only a technological choice but also a cultural shift that can drive innovation and business success.